![[vPython] Өрмекші робот симуляторы: 4 қадам](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Өрмекші робот симуляторы: 4 қадам")
Мазмұны:
- Автор John Day day@howwhatproduce.com.
- Public 2024-01-30 10:27.
- Соңғы өзгертілген 2025-01-23 14:51.


Егер сіз менің дизайнымды қызықты деп тапсаңыз, сіз кішкене қайырымдылық жасай аласыз:
Мен Spider роботымның әрекеттерін модельдеу үшін vPython қолданамын. Бұл компьютерде/Mac -та өзіңіздің жеке қызығушылық әрекеттеріңізді дамытуға, содан кейін arduino -ға жіберуге оңай болады.
Нағыз робот бар, егер сізді қызықтырса
www.instructables.com/id/DIY-Spider-RobotQu…
VPython - бұл Python бағдарламалау тілі, сонымен қатар 2000 жылы Дэвид Шерер шығарған «визуалды» деп аталатын 3D графикалық модулі. VPython навигацияланатын 3D дисплейлер мен анимацияларды, тіпті бағдарламалау тәжірибесі шектеулі адамдар үшін де жеңілдетеді. Бұл Python -ға негізделгендіктен, тәжірибелі бағдарламашылар мен зерттеушілерге де көп нәрсе ұсынады.
1 -қадам: VPython мен редакторды орнатыңыз


python орнатыңыз , 2.7.x пайдалануды ұсынамын
www.python.org/
содан кейін vpython
vpython.org/
және менің сүйікті редакторым - PyCharm
www.jetbrains.com/pycharm/
2 -қадам: кодты жүктеп, іске қосыңыз

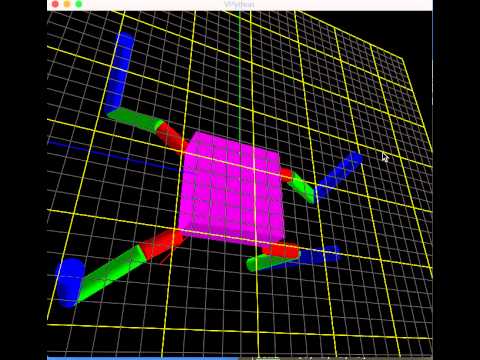
Кодты жүктеп алып, оны PyCharm көмегімен ашыңыз, кодты іске қосыңыз, сонда сіз экранда сәнді 3D өрмекші роботты көресіз, ал тышқанның көмегімен үлкейту/кішірейту үшін, оң жақ түймешікті айналдыру үшін пайдалануға болады.
3 -қадам: Бұл тренажердың көмегімен сіздің әрекеттеріңізді жасаңыз
Егер сіз одан да қызықты әрекеттерді жасап, менімен бөлісе алсаңыз, бұл қызықты болады.
4 -қадам: Нағыз өрмекші роботына қашықтан басқару
Python ойлайтын bluetooth арқылы нағыз роботты басқару туралы не айтуға болады? Кімге керек болса, кейінірек жариялаймын.
Ұсынылған:
DIY RACING GAME симуляторы -- F1 симуляторы: 5 қадам

DIY RACING GAME симуляторы || F1 СИМуляторы: Сәлем баршаға Менің каналыма қош келдіңіз, бүгін мен сізге «Жарыс ойынының симуляторын» қалай құратынымды көрсетемін. Arduino UNO көмегімен. бұл құрастыру блогы емес, бұл тренажердің шолуы мен тесті. Толық құрастыру блогы жақында болады
Төрт өрмекші робот «Майл»: 5 қадам

«Майлс» төртбұрышты өрмекші робот: Ардуино Нано негізінде Майлс - 4 аяғын жүру мен маневр жасау үшін пайдаланатын өрмекші робот. Ол 8 SG90 / MG90 Servo қозғалтқыштарын аяқтар үшін қозғағыш ретінде қолданады, сервистерді қуаттауға және басқаруға арналған реттелетін ПХД -ден тұрады және Arduino Nano
Төрт өрмекші робот - GC_MK1: 8 қадам (суреттермен)
")
Төртбұрышты өрмекші робот - GC_MK1: өрмекші робот aka, GC_MK1 алға және артқа жылжиды, сонымен қатар Arduino -ға жүктелген кодқа байланысты билей алады. Роботта 12 микросерво қозғалтқышы қолданылады (SG90); Әр аяқ үшін 3. Серво қозғалтқыштарын басқару үшін қолданылатын контроллер - бұл Arduino Nan
[DIY] Өрмекші робот (Quad Robot, Quadruped): 14 қадам (суреттермен)
![[DIY] Өрмекші робот (Quad Robot, Quadruped): 14 қадам (суреттермен)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] Өрмекші робот (Quad Robot, Quadruped): 14 қадам (суреттермен)")
[DIY] Өрмекші робот (Quad Robot, Quadruped): Егер сізге қосымша қолдау қажет болса, маған қайырымдылық жасаған дұрыс болар еді: http: //paypal.me/RegisHsu2019-10-10 жаңарту: Жаңа компилятор өзгермелі санды есептеу мәселесін тудырады. Мен қазірдің өзінде кодты өзгерттім. 2017-03-26
[DIY] Өрмекші робот - ІІ БӨЛІМ - Қашықтан басқару: 5 қадам
![[DIY] Өрмекші робот - ІІ БӨЛІМ - Қашықтан басқару: 5 қадам](https://i.howwhatproduce.com/images/003/image-8661-16-j.webp "[DIY] Өрмекші робот - ІІ БӨЛІМ - Қашықтан басқару: 5 қадам")
[DIY] Өрмекші робот - ІІ БӨЛІМ - Қашықтан басқару пульті: Егер сізге менің дизайным қызықты болса, сіз кішкене қайырымдылық жасай аласыз: http: //paypal.me/RegisHsu Менің Өрмекші робот жобамның 2 бөлігі бар - қашықтан басқару әдісі. bluetooth. Міне 1-бөлім-https://www.instructables.com/id/DIY-Spider-Ro